Difference between revisions of "Quadcopter"
(→Usage) |
(→Usage) |
||
| Line 38: | Line 38: | ||
Before you go ahead and assemble the Crazyflie check the Crazyflie control board and the Crazyradio electronics, | Before you go ahead and assemble the Crazyflie check the Crazyflie control board and the Crazyradio electronics, | ||
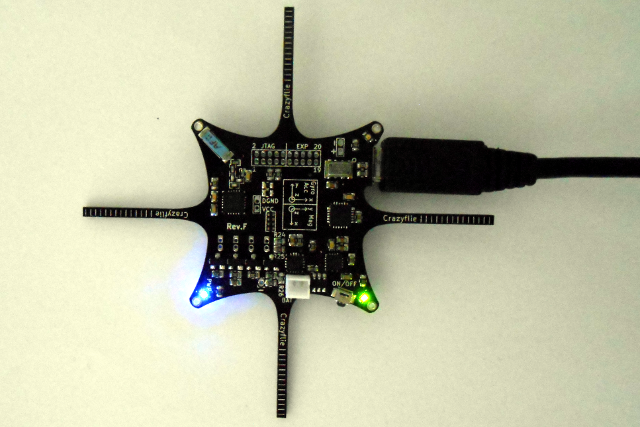
Attach a powered micro-USB cable to the Crazyflie control board. It should power up and blink 5 times with the green LED. After that the green LED should be fully on and the red LED should blink. | Attach a powered micro-USB cable to the Crazyflie control board. It should power up and blink 5 times with the green LED. After that the green LED should be fully on and the red LED should blink. | ||
| + | |||
1.Check the PCB | 1.Check the PCB | ||
| + | The blue led and Green led will light when you connected it to usb port. | ||
[[File:1.png]] | [[File:1.png]] | ||
| − | + | 2.Assembly | |
| − | + | 3 Start to flying | |
* Download the client and install it [https://bitbucket.org/bitcraze/crazyflie-pc-client/downloads/cfclient-win32-install-2013.4.1.exe] | * Download the client and install it [https://bitbucket.org/bitcraze/crazyflie-pc-client/downloads/cfclient-win32-install-2013.4.1.exe] | ||
* If you get error about missing dll, download and install the [http://www.microsoft.com/downloads/details.aspx?FamilyID=9b2da534-3e03-4391-8a4d-074b9f2bc1bf&displaylang=en] | * If you get error about missing dll, download and install the [http://www.microsoft.com/downloads/details.aspx?FamilyID=9b2da534-3e03-4391-8a4d-074b9f2bc1bf&displaylang=en] | ||
Revision as of 09:45, 13 November 2013
1 Introduction 2 Packaging list 3 Hardware Specification 4 Features 5 Usage 6 Update firmware
Contents
Introduction
The Crazyflie is a tiny quadcopter often referred to as a nano-quad, built using the PCB itself as the frame. Developed solely by open source tools and designed with development in mind.A Crazyflie Nano Quadcopter include a crazyflie and a crazyradio. Developed solely by open source tools and designed with development in mind.E. g. we choose 0603 components (resistors & caps) over 0402 to make it easier to replace components. The voltage regulators are adjustable which makes it possible to change the digital and analog supply voltages simply by changing a couple of resistors.
Packaging list
- Crazyflie control board
- 5 x motor mounts (one as spare)
- 5 x coreless motors (one as spare)
- 5 x CW propellers
- 5 x CCW propellers
- 1 LiPo batter
- A crazyradio
Hardware Specification
- Powerful 32 bit MCU: STM32F103CB @ 72 MHz (128kb flash, 20kb RAM)
- 3-axis high-performance MEMs gyros with 3-axis accelerometer: Invensense MPU-6050
- Available footprints to manually solder magnetometer HMC5883L/HMC5983 or/and barometer MS5611 (Mounted on the 10-DOF version)
- Expansion header 2×10 pins 1.27mm (0.05”) pitch including power, I2C/UART, SPI/ADC. Header also contains ARM Cortex 10-pin JTAG (header not included)
- On-board low-energy radio@1mW based on the nRF24L01+ chip.
Features
- Small and lightweight, around 19g and about 90mm motor to motor
- Flight time up to 7 minutes with standard 170mAh Li-Po battery
- Standard micro-USB connector for charging which takes ~20min for the stock 170mAh Li-Po battery
- Up to 80m range (environment dependent) when using the Crazyradio USB dongle
- 4-layer low noise PCB design with separate voltage regulators for digital and analog supply
- Radio bootloader which enables wireless Update firmware
Usage
Before you go ahead and assemble the Crazyflie check the Crazyflie control board and the Crazyradio electronics, Attach a powered micro-USB cable to the Crazyflie control board. It should power up and blink 5 times with the green LED. After that the green LED should be fully on and the red LED should blink.
1.Check the PCB The blue led and Green led will light when you connected it to usb port.

2.Assembly
3 Start to flying
- Download the client and install it [1]
- If you get error about missing dll, download and install the [2]
- Start up the application
- Insert the joystick and Crazyradio,install the Crazyradio Windows driver [3]
- Before you press connect make sure that the joystick is working as expected
and that the thrust is zero. The joystick values should be visible in the flight data box under target.
- Press Connect
- Wait for the scanning to complete
- Double-click the Crazyflie you want to connect to. There's one debug URI for UI testing so you should connect to the URI that begins with radio://XX/XX/XX
- The client will now connect to the Crazyflie and handshake
- One the handshake is done you can start flying the Crazyflie. Remember the most tricky part is the thrust so start out easy
Update firmware
The latest firmware for the Crazyflie Nano Quadcopter can be found here [4]
For updating the Crazyflie firmware there's the possibility to enter bootloader mode and flash new firmware from within the client. The bootloader mode is accessed from the menu Crazyflie→Bootloader. To update the firmware in the Crazyflie do the following:
- Make sure that the Crazyflie is disconnected from the client and powered off
- Go to the menu Crazyflie→Bootloader
- Click “Initiate bootloader cold boot”
- Power on the Crazyflie within 5 seconds using the battery (not USB), the booloader should now connect
- Press “Browse” and select the binary you want to download (e.g. cflie.bin)
- Press “Program” and wait
- Press “Restart in firmware mode”
- To check the firmware version, under the View menu, open up Tabs→Console tab and look at the output when connecting to the Crazyflie.